Implementeer betrouwbare, autonome navigatie op je mobiele platform. Ik ben gespecialiseerd in het configureren, afstemmen en debuggen van de ROS 2 Navigation Stack (Nav2) en SLAM-pijplijnen om robuuste lokalisatie en soepele padplanning te garanderen.
Technische scope:
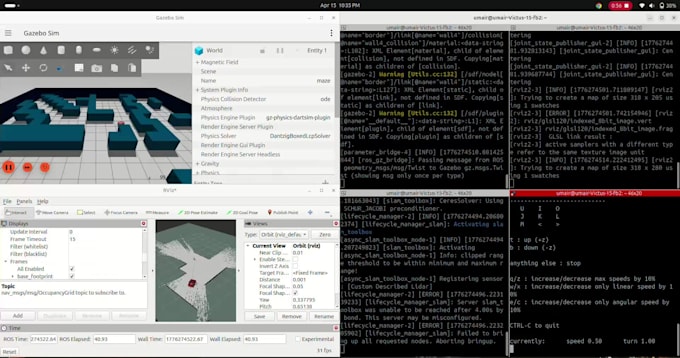
- Mapping & SLAM: Configuratie van SLAM Toolbox of Cartographer voor het genereren van hoge-resolutie 2D-occupancy grid.
- Lokalisatie afstemmen: Optimalisatie van AMCL (Adaptive Monte Carlo Localization) parameters om particle dispersion en drift te voorkomen.
- Kostenkaart configuratie: Afstemmen van globale en lokale kostenkaarten, inflatieradii en obstakellagen voor veilige botsingsvermijding.
- Padplanning & controle: Aanpassen van behavior tree samen met aangepaste configuraties voor planners en controllers (Dijkstra, DWA of TEB Local Planner).
Compatibel met zowel ROS 2 Humble als Jazzy setups. Gelieve je URDF of Gazebo-omgeving details te verstrekken voordat je begint.