Door categorieën bladeren
Ontdekken
Fiverr Pro
Nederlands
$
USD




Automatische vertaling
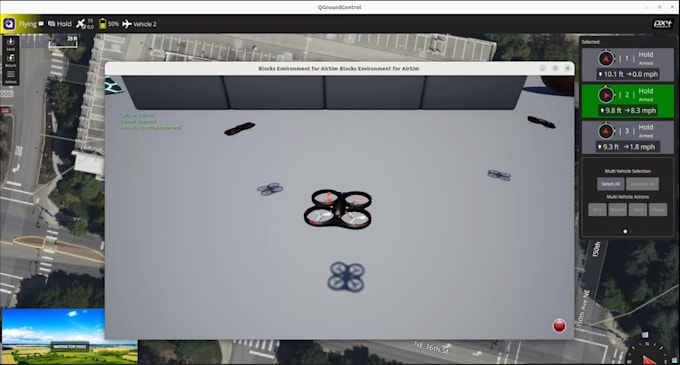
Voordat je een custom drone van 5000 dollar crasht of een fysiek prototype beschadigt, heb je een physics-accurate simulatie nodig.
Je code testen in een virtuele omgeving is de veiligste en meest kosteneffectieve manier om robotica te ontwikkelen. Het garandeert nul risico voor je hardware en bespaart je duizenden euro's aan reparatie- en vervangingskosten.
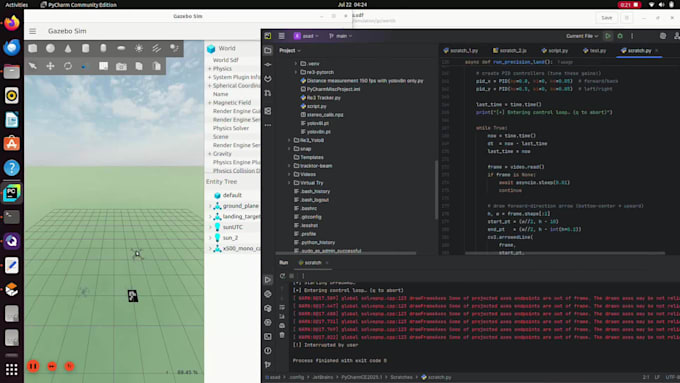
Ik ben een robotica- en aerospace-ingenieur die op maat gemaakte testomgevingen bouwt in Gazebo en Unity. Of je nu hulp nodig hebt bij het converteren van een CAD-bestand naar een werkende URDF, of een complexe 3D-omgeving met geavanceerde physics en volledige controle/navigatie-integratie, ik kan precies maken wat jouw project vereist.
Wat ik voor jouw project kan doen:
Tools: Gazebo, Unity3D, ROS/ROS2, Python, C++, SolidWorks.
AI Developer, Robotics Engineer, FPV Drone Design Expert
Talen
Automatische vertaling
Automatische vertaling
Welke soorten projecten zijn het meest geschikt voor jouw simulaties?
Ze zijn perfect voor het testen van autonome rovers (UGVs), aangepaste drones (UAVs) en robotarmen. Als je ROS/ROS2 navigatiestacks, computer vision algoritmes wilt testen of fysieke beperkingen wilt verifiëren voordat je echte hardware bouwt, zijn deze simulaties de ideale keuze.