Door categorieën bladeren
Ontdekken
Fiverr Pro
Nederlands
$
USD
Ontwerpingenieur Fabricage
Niveau 2
Voldoet aan hoge prestatiecriteria en heeft een bewezen staat van dienst in het voldoen aan de verwachtingen van de klant.
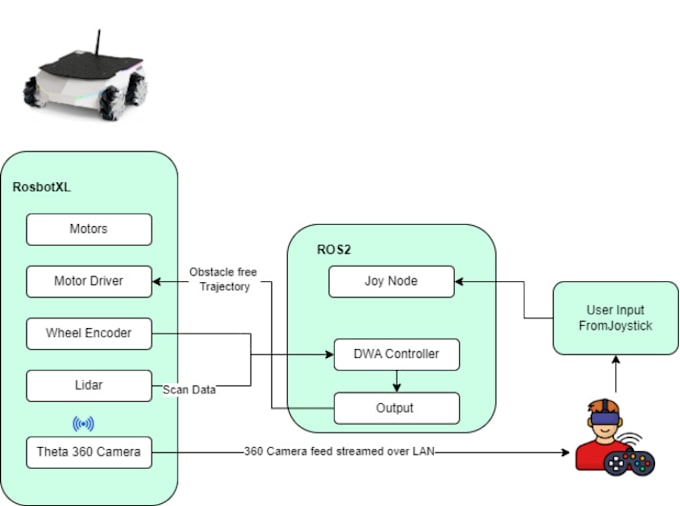
Ben je bezig met het bouwen van een mobiele robot of autonoom systeem en heb je deskundige ondersteuning nodig met ROS 2? Je bent op de juiste plek! Ik specialiseer me in het ontwikkelen van geavanceerde robotics projecten met ROS 2, met focus op:
Wat ik aanbied:
Navigation Stack (Nav2)
Wil je dat je robot autonoom door kaarten navigeert, obstakels vermijdt of waypoints volgt? Ik configureer en stem de volledige Nav2 stack af, inclusief mapping, localisatie, padplanning en gedragbomen.
Robot kinematica
Ik implementeer en valideer voorwaartse en omgekeerde kinematica voor differentiële, omnidirectionele of aangepaste mobiele bases.
Aangepaste Python controllers
Van het schrijven van ROS 2 nodes in Python tot het bouwen van aangepaste controllers voor motion planning of sensor fusion, ik pas oplossingen aan op jouw unieke robotbehoeften.
Simulatie (Gazebo, RViz)
Test je robot in simulatie voordat je naar de echte wereld gaat. Ik ondersteun Gazebo/Ignition, RViz2 en meer.
Laten we samen je robot bouwen!
Stuur me een bericht voordat je een bestelling plaatst, zodat ik je behoeften kan begrijpen en de beste oplossing kan leveren.
Groeten,
Syed Huzaifa




Platform:
Raspberry Pi
Sensoren:
Versnellingsmeter
•
Camera
•
Lidar
•
Positie
•
Locatie
Expertise:
Microcontrollers
•
IoT
•
ROS
•
AI
•
Programmeren