Door categorieën bladeren
Ontdekken
Fiverr Pro
Nederlands
$
USD
Niveau 1
Voldoet aan bepaalde prestatiecriteria en toont een sterke potentie op de marktplaats.
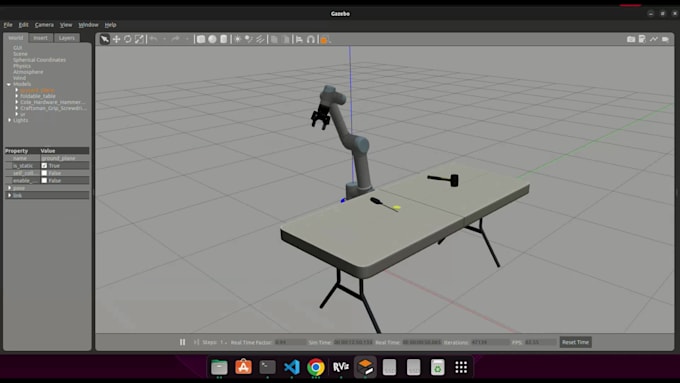
Ik help bij het simuleren van robotarmen met motion planning en controle in ROS2 Gazebo. Ik kan op maat gemaakte oplossingen leveren die aansluiten bij jouw wensen.
Waarom kiezen voor mij?